系统讲解多旋翼无人机物理建模,涵盖坐标系、动力学方程、力与力矩生成及级联PID控制。
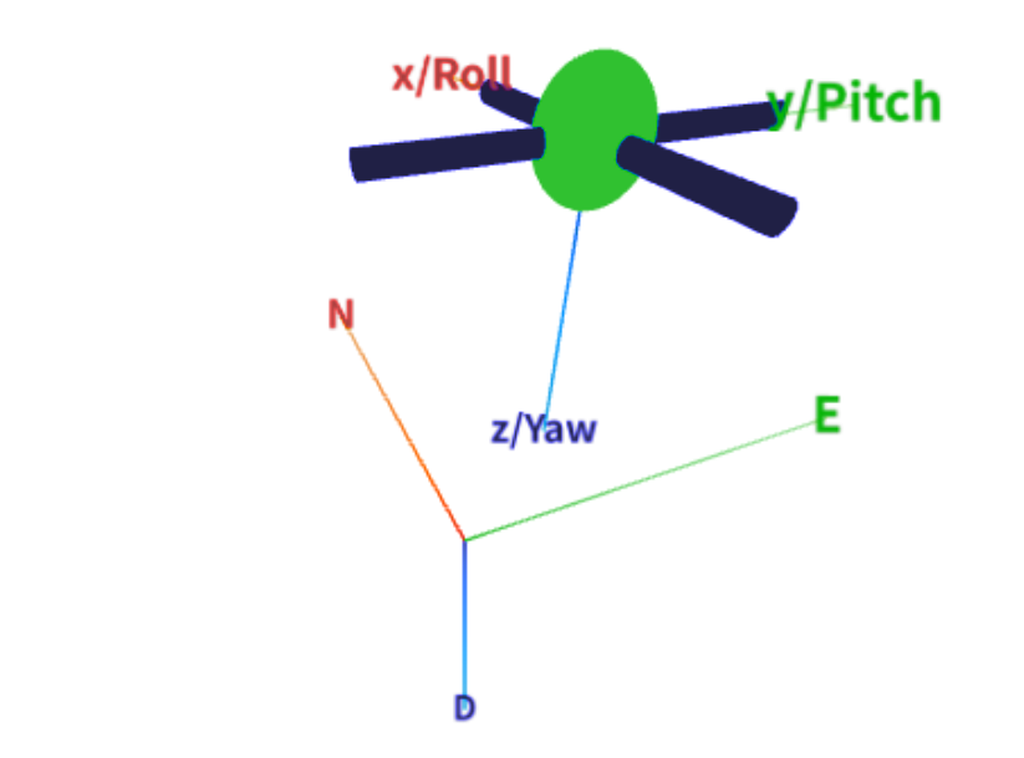
多旋翼无人机以6自由度建模:3个线性轴(x、y、z)和3个旋转轴(横滚、俯仰、偏航)。通常采用北-东-地坐标系,正x轴指向前方即北,正y轴指向右方即东,正z轴指向下方,构成右手坐标系。文章假设读者具备入门级线性代数、微积分和经典力学基础。
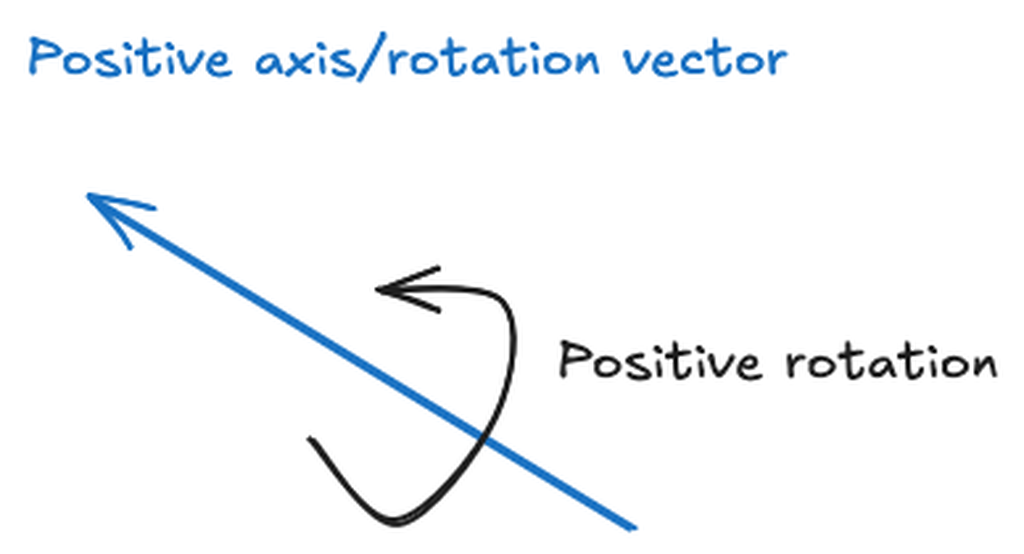
描述飞行器需要使用两个参考系。惯性参考系是静态的世界框架。机体固定参考系坐标轴与刚体重心对齐,随飞行器移动和旋转。飞行器位置由机体相对于惯性系的位移向量表示。机体方位遵循Tait-Bryan角约定,按偏航绕惯性z轴、俯仰绕新y轴、横滚绕新x轴的顺序进行三次连续旋转确定。旋转矩阵用于在两种参考系之间转换向量。输运定理则解释了在旋转参考系中向量变化率的两部分构成:向量自身在其坐标系中的变化加上旋转坐标系的变化率。
飞行器的完整状态由12个变量完全描述:惯性系中的三维位置、机体系轴向的三维速度向量、三个欧拉角表示的机体方位以及沿机体系三个轴的瞬时角速度。
力与力矩在机体坐标系中表示。作用于飞行器的力包括推力和重力。p个螺旋桨的总推力沿机体z轴方向,重力在惯性系中指向下方转换为机体系坐标后与其他力合并。线运动方程基于牛顿第二定律结合输运定理推导,加速度由推力除以质量、重力分量和速度叉积项共同决定。
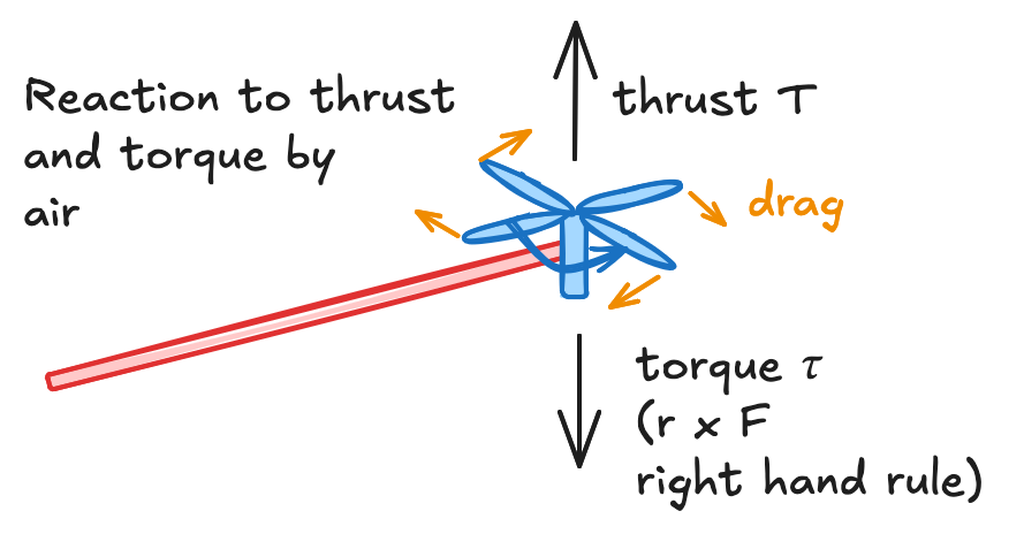
角运动方程涉及转动惯量矩阵。文章将飞行器近似为四类形状的组合:实心球、实心圆柱关于对称轴和垂直对称轴、以及点质量,结合平行轴定理计算总转动惯量。假设轴向对称后,惯性矩阵简化为对角阵。两种力矩作用于飞行器:推力力矩通过各螺旋桨推力与质心向量的叉积求和产生,引起俯仰和横滚;偏航力矩由电机扭矩产生。角速率变化率通过转动惯量矩阵求逆后计算得到。
螺旋桨推力模型与转速的平方成正比,扭矩同理。无刷直流电机由反电动势常数和内阻参数化,动力学方程将外加电压、电磁扭矩、摩擦耗散和螺旋桨阻力扭矩串联起来。
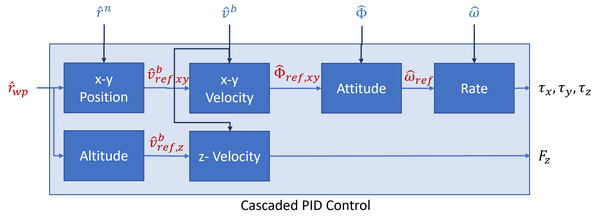
控制层面采用级联PID架构。误差信号通过三个层次传播:水平位置误差产生期望速度,速度误差产生期望姿态角,姿态角误差产生期望角速度。垂直方向单独控制。最终输出所需推力及三轴力矩,通过控制分配矩阵映射到各电机转速。对于非方阵求逆,使用伪逆或奇异值分解。更高层路径规划可使用S曲线和B样条构建满足飞行器约束的平滑轨迹。文章推荐ArduPilot作为开源控制与仿真框架的进一步参考。
原文:https://iahmed.me/post/drone-physics/